MPU-6050 en action: Guide pratique de la configuration, de la configuration et de la gestion du bruit
Catalogue
Introduction au MPU-6050
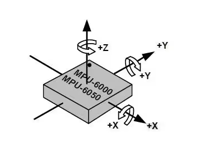
MPU-6050 est le premier composant de traitement de mouvement à 6 axes intégré au monde, qui intègre un gyroscope à 3 axes, un accéléromètre à 3 axes et un processeur de mouvement numérique évolutif (DMP).Le but de l'utiliser est d'obtenir l'angle d'inclinaison de l'objet à mesurer (comme un quadcopter, une voiture d'équilibrage) sur les axes x, y et z, c'est-à-dire l'angle de tangage, l'angle de rouleau et l'angle de lacet.Nous lisons les six données du MPU-6050 (valeur AD d'accélération à trois axes et valeur AD de vitesse angulaire à trois axes) via l'interface I2C.Après le traitement de la fusion de posture, les angles de hauteur, de roulis et de lacet peuvent être calculés.En tant que référence directionnelle pour les valeurs de mesure, la définition de la direction des coordonnées du capteur est comme indiqué dans la figure ci-dessous, qui suit le principe du système de coordonnées droitiers (c'est-à-dire que le pouce droit pointe vers la direction positive du x-L'axe, l'index pointe vers la direction positive de l'axe y et le doigt majeur pointe vers la direction positive de l'axe z).
Avec son bus de capteur I2C dédié, le MPU-6050 est capable de recevoir une entrée directement à partir d'une boussole externe à 3 axes, fournissant une sortie complète de MotionFusion ™ à 9 axes.Il élimine le problème de divergence entre le gyroscope combiné et la chronologie de l'accélérateur et réduit considérablement l'espace d'emballage par rapport aux solutions multi-composants.Lorsqu'il est connecté à un magnétomètre à trois axes, le MPU-60X0 est capable de fournir une sortie de fusion de mouvement à 9 axes complète à son port I2C ou SPI principal (notez que le port SPI n'est disponible que sur le MPU-6000).
Alternatives et équivalents
• MPU-3300
• MPU-6000
• MPU-6500
Fabricant de MPU-6050
Le fabricant de MPU-6050 est TDK.Après que les deux fondateurs de TDK, le Dr Yogoro Kato et Takei Takei, ont inventé la ferrite à Tokyo, ils ont fondé Tokyo Denkikagaku Kogyo K.K.En 1935. En tant que marque mondiale de l'industrie de l'électronique, TDK a toujours maintenu une position dominante dans les domaines des matières premières électroniques et des composants électroniques.Le portefeuille de produits complet et axé sur l'innovation de TDK couvre les composants passifs tels que les condensateurs en céramique, les condensateurs électrolytiques en aluminium, les condensateurs de films, les produits magnétiques, les composants à haute fréquence, les dispositifs piézoélectriques et de protection, ainsi que les systèmes de capteurs et de capteurs (tels que la température et la pression,Capteurs magnétiques et MEMS), etc. En outre, TDK fournit également des alimentations et des dispositifs d'énergie, des têtes magnétiques et d'autres produits.Ses marques de produits incluent TDK, EPCOS, Invensense, Micronas, Tronics et TDK-Lambda.
Diagramme de blocs interne du MPU-6050
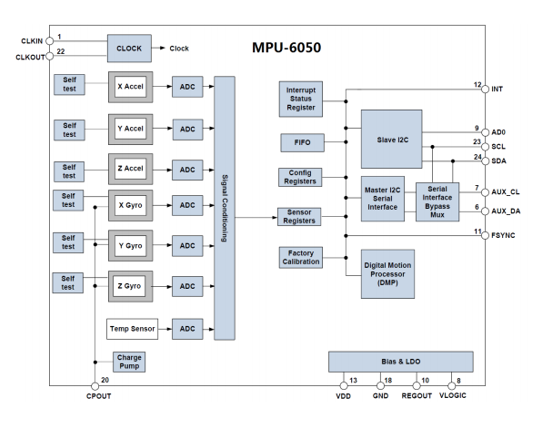
Parmi eux, SCL et SDA se trouvent les interfaces IIC connectées au MCU, et le MCU contrôle le MPU-6050 via cette interface IIC.Il y a aussi une interface IIC, à savoir AUX_CL et AUX_DA.Cette interface peut être utilisée pour connecter des dispositifs d'esclaves externes, tels que des capteurs magnétiques, pour former un capteur à neuf axes.Vlogic est la tension du port IO.Cette broche peut prendre en charge un minimum de 1,8 V.Nous le connectons généralement directement au VDD.AD0 est la broche de commande d'adresse de l'interface IIC esclave (connectée au MCU).Cette broche contrôle le bit le plus bas de l'adresse IIC.S'il est connecté à GND, l'adresse IIC de MPU-6050 est 0x68;S'il est connecté à VDD, il est 0x69.Veuillez noter que l'adresse ici n'inclut pas le bit le plus bas de transmission de données (le bit le plus bas est utilisé pour représenter les opérations de lecture et d'écriture).Sur le MWBalancedStC15, AD0 est connecté à GND, donc l'adresse IIC du MPU-6050 est 0x68 (à l'exclusion du bit le plus bas).
Initialiser l'interface IIC
MPU-6050 utilise IIC pour communiquer avec STC15, nous devons donc initialiser les lignes de données SDA et SCL connectées au MPU-6050 en premier.
Réinitialiser MPU-6050
Cette étape restaure tous les registres à l'intérieur du MPU-6050 à leurs valeurs par défaut, ce qui est réalisé en écrivant 1 au bit 7 du registre de gestion de l'alimentation 1 (0x6b).Après réinitialisation, le registre de gestion de l'alimentation 1 sera restauré à la valeur par défaut (0x40), et ce registre doit par la suite être défini sur 0x00 pour réveiller le MPU-6050 et le mettre dans un état de travail normal.
Réglez la plage à grande échelle du capteur de vitesse angulaire (gyroscope) et du capteur d'accélération
Dans cette étape, nous définissons la plage à grande échelle (FSR) des deux capteurs via le registre de configuration du gyroscope (0x1b) et le registre de configuration du capteur d'accélération (0x1c) respectivement.En règle générale, nous avons réglé la plage à grande échelle du gyroscope à ± 2000 dps et la plage à grande échelle de l'accéléromètre à ± 2G.
Définir d'autres paramètres
Ici, nous devons également configurer les paramètres suivants: désactiver les interruptions, désactiver l'interface AUX I2C, désactiver FIFO, définir le taux d'échantillonnage du gyroscope et configurer le filtre passe-bas numérique (DLPF).Étant donné que nous n'utilisons pas d'interruptions pour lire les données dans ce chapitre, la fonction d'interruption doit être désactivée.En même temps, comme nous n'utilisons pas l'interface AUX I2C pour connecter d'autres capteurs externes, nous devons également fermer cette interface.Ces fonctions peuvent être contrôlées via le registre d'activation d'interruption (0x38) et le registre de contrôle utilisateur (0x6a).MPU-6050 peut utiliser FIFO pour stocker les données des capteurs, mais nous ne l'avons pas utilisée dans ce chapitre, donc tous les canaux FIFO doivent être fermés.Cela peut être contrôlé via le registre d'activation FIFO (0x23).Par défaut, la valeur de ce registre est 0 (c'est-à-dire que FIFO est désactivée), nous pouvons donc utiliser directement la valeur par défaut.Le taux d'échantillonnage du gyroscope est contrôlé par le registre du diviseur d'échantillonnage (0x19).Normalement, nous définissons ce taux d'échantillonnage sur 50. La configuration du filtre à bas de passe (DLPF) numérique est terminée via le registre de configuration (0x1a).De manière générale, nous définirons DLPF à la moitié de la bande passante pour équilibrer la précision des données et la vitesse de réponse.
Configurez la source d'horloge système et activez le capteur de vitesse angulaire et le capteur d'accélération
Le réglage de la source d'horloge système dépend du registre de gestion de l'alimentation 1 (0x6b), où les trois bits les plus bas de ce registre déterminent la sélection de la source d'horloge.Par défaut, ces trois bits sont définis sur 0, ce qui signifie que le système utilise l'oscillateur RC interne 8 MHz comme source d'horloge.Cependant, afin d'améliorer la précision de l'horloge, nous la définissons souvent sur 1 et sélectionnons le gyroscope à axe x comme source d'horloge.De plus, l'activation du capteur de vitesse angulaire et du capteur d'accélération est également une étape importante du processus d'initialisation.Les deux opérations sont implémentées via Power Management Register 2 (0x6c).Réglez simplement le bit correspondant sur 0 pour activer le capteur correspondant.Après avoir terminé les étapes ci-dessus, le MPU-6050 peut entrer dans l'état de travail normal.Les registres qui ne sont pas spécialement définis adopteront les valeurs par défaut prédéfinies par le système.
Comment fonctionne le MPU-6050?
Capteur gyro
Le capteur est équipé d'un gyro à l'intérieur, qui restera toujours parallèle à la direction initiale due à l'effet gyroscopique.Par conséquent, nous pouvons calculer la direction et l'angle de rotation en détectant l'écart du gyroscope par rapport à la direction initiale.
Capteur d'accéléromètre
Un capteur d'accéléromètre est un appareil qui peut mesurer l'accélération et il fonctionne sur la base du principe de l'effet piézoélectrique.Pendant l'accélération, le capteur mesure la force inertielle appliquée au bloc de masse, puis calcule la valeur d'accélération en utilisant la deuxième loi de Newton.
Processeur de mouvement numérique (DMP)
Le DMP est un module de traitement des données de la puce MPU6050 qui a un algorithme de filtrage Kalman intégré pour acquérir des données à partir du gyroscope et des capteurs d'accéléromètre et traitement des quaternions de sortie.Cette caractéristique réduit considérablement la charge de travail du microprocesseur périphérique et évite le processus de filtrage et de fusion de données fastidieux.
Notes:
Quaternions: les quaternions sont des numéros de supercomplex simples.Les nombres complexes sont composés de nombres réels plus l'unité imaginaire I, où i ^ 2 = -1.
Où est utilisé MPU-6050?
• jouets
• Jeu de combiné et portable
• contrôleurs de jeux basés sur le mouvement
• Technologie Blurfree ™ (pour la stabilisation vidéo / immobile)
• Technologie AirSign ™ (pour la sécurité / authentification)
• Reconnaissance des gestes IG ™ IG ™
• Capteurs portables pour la santé, la forme physique et les sports
• Framework de jeu et d'application compatible avec mouvement
• Technologie MotionCommand ™ (pour les raccourcis geste)
• Services basés sur la localisation, points d'intérêt et calculs morts
• Remote 3D pour les DTV et les décodeurs connectés à Internet, les souris 3D
• Technologie Touchanywhere ™ (pour le contrôle / navigation des applications d'interface utilisateur «No Touch»)
Ensemble de MPU-6050
Comment réduire le bruit du MPU-6050?
Nous pouvons prendre les moyens suivants pour réduire le bruit du MPU-6050:
Utilisez des capteurs calibrés: l'étalonnage de l'accéléromètre et du gyroscope du MPU-6050 peut éliminer le biais et l'erreur des capteurs eux-mêmes, réduisant ainsi l'effet du bruit.Le processus d'étalonnage se compose généralement de deux étapes: l'étalonnage statique et l'étalonnage de mouvement.
Processus de filtrage matériel: l'ajout de condensateurs filtrants à la ligne électrique du MPU-6050 peut réduire l'impact du bruit d'alimentation sur le capteur.Pendant ce temps, lors de la disposition des PCB, nous devons essayer de garder MPU-6050 loin des sources potentielles d'interférence, telles que les lignes de signal à haute fréquence et les composants de haute puissance.
Traitement du filtrage des logiciels: Après avoir collecté les données brutes du MPU-6050, nous pouvons ajouter un lien de filtrage logiciel pour prétraiter les données initiales pour éliminer les interférences induites par le bruit.Les méthodes de filtrage logiciel couramment utilisées comprennent le filtrage moyen, le filtrage médian, le filtrage de Kalman, etc.
Utilisez un filtre passe-bas interne: MPU-6050 possède un filtre passe-bas numérique intégré interne, qui peut être utilisé pour réduire le bruit à haute fréquence en définissant sa fréquence de coupure.Plus précisément, nous pouvons définir la fréquence de coupure du filtre numérique en modifiant le registre de configuration du MPU-6050 pour éliminer le bruit à haute fréquence causé par l'échantillonnage A / D.
Calcul de la trajectoire de mouvement basée sur MPU-6050
Le MPU-6050 est un accéléromètre à six axes et un capteur de gyroscope qui peut être utilisé pour mesurer le mouvement et l'attitude des objets.Le calcul de la trajectoire de mouvement basé sur MPU-6050 peut être réalisé par les étapes suivantes:
La première étape consiste à lire les données du capteur.Nous devons lire les données de l'accéléromètre et du gyroscope des capteurs MPU-6050 à l'aide de pilotes et de fonctions de bibliothèque appropriés.Ces données sont généralement sorties dans un format numérique, donc certains travaux de conversion et d'étalonnage sont nécessaires pour les convertir en mesures réelles dans les unités physiques.
La deuxième étape consiste à calculer l'accélération.Tout d'abord, nous devons traiter les données de l'accéléromètre pour dériver l'accélération de l'objet dans chaque axe.Par la suite, afin de calculer la vitesse et le déplacement de l'objet dans chaque axe, nous devons intégrer les données d'accélération.Les techniques d'intégration numérique, telles que la méthode d'Euler ou la méthode Lunger-Kutta, sont souvent utilisées dans ce processus pour assurer la précision des calculs de déplacement.
La troisième étape consiste à calculer la vitesse angulaire.En utilisant les données du gyroscope, la vitesse angulaire de l'objet dans chaque axe peut être calculée.Encore une fois, ces données doivent être calibrées et converties pour obtenir la vitesse angulaire dans les unités physiques réelles.
La quatrième étape consiste à calculer la rotation.En intégrant les données de vitesse angulaire, l'angle de rotation de l'objet dans chaque axe peut être calculé.Cela peut être fait en utilisant des techniques d'intégration numérique telles que la méthode d'Euler ou la méthode Longe-Kutta pour calculer l'angle.
La cinquième étape consiste à fusionner les données.Nous combinons les données des accéléromètres et des gyroscopes pour obtenir des informations d'attitude et de position complètes de l'objet.Cela peut être fait à l'aide d'algorithmes tels que le solveur d'attitude basé sur le quaternion ou le solveur d'angle Euler.
La sixième étape consiste à visualiser les résultats.Nous convertissons la trajectoire de mouvement de l'objet calculé en un ensemble de points dans un système de coordonnées 3D et l'avons affiché en utilisant des outils de visualisation appropriés pour une compréhension plus intuitive de la trajectoire de mouvement et des changements d'attitude de l'objet.
Questions fréquemment posées [FAQ]
1. Quelle est la précision MPU6050?
Les résultats acquis ont montré une précision suffisante de moins de 1% et une fiabilité, garantissant le dimensionnement approprié de la tige de l'ascenseur et les normes élevées de l'industrie de l'ascenseur.
2. Comment lire les données de MPU6050?
Pour lire les registres internes MPU6050, le maître envoie une condition de départ, suivi de l'adresse d'esclave I2C et d'un bit d'écriture, puis de l'adresse de registre qui sera lue.
3. Où est utilisé MPU6050?
Dans les dispositifs de suivi de la santé portable, de suivi du fitness.Dans les drones et les quadcoptères, le MPU6050 est utilisé pour le contrôle de la position.Utilisé dans le contrôle du bras robotique.Dispositifs de contrôle des gestes de la main.
4. MPU6050 est-il un IMU?
Le bloc du capteur IMU MPU6050 lit les données du capteur MPU-6050 connecté au matériel.Le bloc produit l'accélération, la vitesse angulaire et la température le long des axes du capteur.
5. Quel est le traitement de MPU6050?
Il s'agit du processeur embarqué du MPU6050 qui combine les données provenant de l'accéléromètre et du gyroscope.Le DMP est la clé de l'utilisation du MPU6050 et est expliqué en détail plus tard.Comme pour tous les microprocesseurs, le DMP a besoin de micrologiciel pour s'exécuter.
À propos de nous
ALLELCO LIMITED
Lire la suite
Enquête rapide
Veuillez envoyer une demande, nous répondrons immédiatement.

Guide approfondi de LM317: Compréhension des régulateurs de tension réglables
sur 2024/09/3
Comprendre le TL431: un guide complet des régulateurs de shunt de précision
sur 2024/09/3
Articles populaires
-
Qu'est-ce que GND dans le circuit?
sur 1970/01/1 3108
-

Guide du connecteur RJ-45: codes de couleur du connecteur RJ-45, schémas de câblage, applications R-J45, feuilles de données RJ-45
sur 1970/01/1 2672
-
Comprendre les tensions d'alimentation en électronique VCC, VDD, VEE, VSS et GND
sur 0400/11/15 2211
-

Types de connecteur de fibre: SC vs LC et LC vs MTP
sur 1970/01/1 2182
-

Comparaison entre DB9 et RS232
sur 1970/01/1 1802
-

Qu'est-ce qu'une batterie LR44?
L'électricité, cette force omniprésente, imprègne tranquillement tous les aspects de notre vie quotidienne, des gadgets triviaux aux équipements médicaux potentiellement mortels, il joue un rôle silencieux.Cependant, saisir vraiment cette énergie, en particulier la façon de les stocker et de le produire efficacement, n'est pas une tâche facile.C'est dans ce contexte que cet article se co...sur 1970/01/1 1774
-
Comprendre les principes fondamentaux: résistance à l'inductance et connexion
Dans la danse complexe de l'ingénierie électrique, un trio d'éléments fondamentaux occupe le devant de la scène: inductance, résistance et capacité.Chacun porte des traits uniques qui dictent les rythmes dynamiques des circuits électroniques.Ici, nous nous lançons dans un voyage pour déchiffrer les complexités de ces composants, pour découvrir leurs rôles et utilisations pratiques dis...sur 1970/01/1 1728
-

Guide complet de la batterie CR2430: spécifications, applications et comparaison avec les batteries CR2032
Qu'est-ce que la batterie CR2430?Avantages des batteries CR2430NormeApplications de la batterie CR2430CR2430 équivalentCR2430 vs CR2032Taille de la batterie CR2430Que rechercher lors de l'achat du CR2430 et des équivalentsFiche de données PDFQuestions fréquemment posées Les batteries sont le cœur des petits appareils électroniques.Parmi les nombreux types disponibles, les cellules de monnai...sur 1970/01/1 1673
-
Qu'est-ce que RF et pourquoi l'utilisons-nous?
La technologie de radiofréquence (RF) est un élément clé de la communication sans fil moderne, permettant la transmission des données sur de longues distances sans connexions physiques.Cet article plonge dans les bases de la RF, expliquant comment le rayonnement électromagnétique (EMR) rend possible la communication RF.Nous explorerons les principes de la DME, la création et le contrôle d...sur 1970/01/1 1670
-
Guide complet de la HFE dans les transistors
Les transistors sont des composants cruciaux dans les dispositifs électroniques modernes, permettant une amplification et un contrôle du signal.Cet article se plonge sur les connaissances entourant HFE, y compris comment sélectionner la valeur HFE d'un transistor, comment trouver HFE et le gain de différents types de transistors.Grâce à notre exploration de HFE, nous comprenons une compréhe...sur 5600/11/15 1632
Numéro de pièce chaud
-

SP4208-01FTG-C
Littelfuse Inc.
TVS DIODE 8VWM 25VC SOD323
TPS60400DBVRG4
Texas Instruments
IC REG CHARG PUMP INV 60MA SOT23
MCP6S28-I/SL
Microchip Technology
IC OPAMP PGA 8 CIRCUIT 16SOIC
MAX4080TAUA+T
Analog Devices Inc./Maxim Integrated
IC CURRENT SENSE 1 CIRCUIT 8UMAX
ISO122JU/1K
Texas Instruments
IC OPAMP ISOLATION 1 CIRC 8SOIC
S-8213AAG-I6T1U
ABLIC Inc.
IC BATT PROT LI-ION 2-3CL SNT-6A
VI-JT4-CW
Vicor Corporation
DC DC CONVERTER 48V 100W
RT9819A-48GU3
Richtek USA Inc.
IC SUPERVISOR 1 CHANNEL SC70-3
RT0805DRD0724K9L
YAGEO
RES SMD 24.9K OHM 0.5% 1/8W 0805
ADM4857ARZ
Analog Devices Inc.
IC TRANSCEIVER FULL 1/1 8SOIC
MX29GL512FHT2I-11G
Macronix
IC FLASH 512MBIT PARALLEL 56TSOP
S-80840CLUA-B6ZT2G
ABLIC Inc.
IC SUPERVISOR 1 CHANNEL SOT89-3
1206YD225JAT2A
KYOCERA AVX
CAP CER 2.2UF 16V X5R 1206
DS14185WM
Texas Instruments
IC TRANSCEIVER FULL 3/5 20SOIC
SN74AHCT1G08DRLR
Texas Instruments
IC GATE AND 1CH 2-INP SOT5
LBB120STR
IXYS Integrated Circuits Division
SSR RELAY SPST-NC 170MA 0-250V
EP3SE50F484I3G
Intel
IC FPGA 296 I/O 484FBGA
93LC56BT-I/SN
Microchip Technology
IC EEPROM 2KBIT MICROWIRE 8SOIC -

FSBCW30
onsemi
TRANS PNP 32V 0.5A SOT23-3
EL5375IU-T7
Renesas Electronics America Inc
IC OPAMP DIFF 3 CIRCUIT 24QSOP
QD48T033050-NCB0
Bel Power Solutions
DC DC CONVERTER 3.3V 5V 100W
RB521S30T5G
Fairchild Semiconductor
DIODE SCHOTTKY 30V 200MA SOD523
DSI2X55-16A
IXYS
DIODE MODULE 1.6KV 56A SOT227B
VI-2WT-IW
Vicor Corporation
DC DC CONVERTER 6.5V 100W
AQV214AZ
Panasonic Electric Works
SSR RELAY SPST-NO 120MA 0-400V
1808WC182KAT1A
KYOCERA AVX
CAP CER 1800PF 2.5KV X7R 1808
RP131K551B-TR
Nisshinbo Micro Devices Inc.
IC REG LINEAR 5.5V 1A DFN1820-6
PQ30RV31J00H
Sharp Microelectronics
IC REG LINEAR POS ADJ 3A TO220-4
SN7497N
Texas Instruments
IC SYNC 6BIT BIN RATE MULT 16DIP
AD620BNZ
Analog Devices Inc.
IC INST AMP 1 CIRCUIT 8DIP
RCLAMP0582N.TCT
Semtech Corporation
TVS DIODE 6.5VWM 25VC SLP1210N6
TPS65218B101PHPR
Texas Instruments
IC REG ARM A8/A9 7OUT 48HTQFP
CSD25310Q2
Texas Instruments
MOSFET P-CH 20V 20A 6WSON
R3240
Microchip Technology
STD RECTIFIER
AC0603JRNPO9BN220
YAGEO
CAP CER 22PF 50V C0G/NPO 0603
AT97SC3204T-X2MB-10
Microchip Technology
IC CRYPTO TPM TWI 40QFN -

MAX3095CSE
Analog Devices Inc./Maxim Integrated
IC RECEIVER 0/4 16SO
MAX6946ATE+T
Analog Devices Inc./Maxim Integrated
IC LED DRIVER LINEAR 20MA 16TQFN
MTB15N06VT4
onsemi
N-CHANNEL POWER MOSFET
C2012Y5V1H105Z/0.85
TDK Corporation
CAP CER 1UF 50V Y5V 0805
FR02FR10P-R
NKK Switches
SWITCH ROTARY DIP BCD 100MA 5V
PDB183-GTR21-254A2
Bourns Inc.
POT 250K OHM 1/10W CARBON LOG
CL21C471JBANNNC
Samsung Electro-Mechanics
CAP CER 470PF 50V C0G/NP0 0805
TS924IN
STMicroelectronics
IC OPAMP GP 4 CIRCUIT 14DIP
V48B12M250BL2
Vicor Corporation
DC DC CONVERTER 12V 250W
AT25DF011-SSHN-T
Adesto Technologies
IC FLASH 1MBIT SPI 104MHZ 8SOIC
ADC0831CCN
Texas Instruments
IC ADC 8BIT SAR 8DIP
CS5205-1GDP3
onsemi
IC REG LINEAR ADJ LDO REGULATOR
1SMC36AT3G
Littelfuse Inc.
TVS DIODE 36VWM 58.1VC SMC
MA12070PXUMA1
Infineon Technologies
IC AMP CLASS D STEREO 30W 64QFN
VIPER28LN
STMicroelectronics
IC OFFLINE SWITCH FLYBACK 7DIP
245801034002829+
KYOCERA AVX
CONNECTOR BOARD TO BOARD
VS-403CNQ100PBF
Vishay General Semiconductor - Diodes Division
DIODE MODULE 100V 200A TO244
TPS62230DRYT
Texas Instruments
IC REG BUCK 2.5V 500MA 6SON