TB6600HG MOTEUR DE MOTEUR SUPPORT: Spécifications, fonctionnalités et applications
Catalogue
TB6600Hg Description

Tb6600hg est un conducteur de moteur bipolaire bipolaire bipolaire de type PWM de type unique.Il peut atteindre le contrôle de rotation vers l'avant et inversé via des modes d'excitation en phase 2 phases, 1-2 phases, en phase W1-2, 2W1-2 et 4W1-2.Les moteurs pas à pas bipolaires en 2 phases sont entraînés uniquement par un signal d'horloge à faible vibration et à haute efficacité.
Alternatives et équivalents:
• TB6600FG
• L6258EX
Spécifications de TB6600Hg
• État de la pièce: actif
• Emballage: plateau
• Package / cas: HZIP-25
• Fabricant: Toshiba
• Courant de l'alimentation de fonctionnement: 4,2 mA
• Tension d'alimentation de fonctionnement: 2 V à 5,5 V
• Tension de chargement: 8 V à 42 V
• Nombre de sorties: 2 sorties
• PD - dissipation de puissance: 40 W
• Style de montage: à travers le trou
• Longueur de package / largeur / hauteur: 29,3 mm (max) /4.5 mm/15,7 mm
• Catégorie de produit: Contrôleurs et pilotes de moteur / mouvement / d'allumage
Conditions de fonctionnement de TB6600Hg
(TA = -30 ° C à 85 ° C)
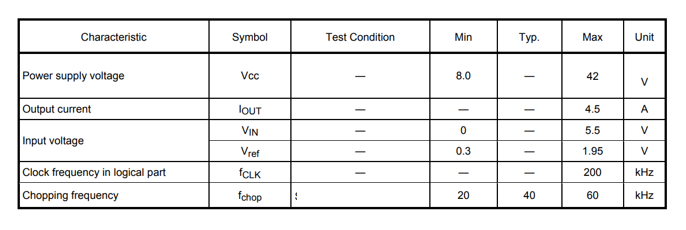
Remarque: deux bornes VCC doivent être programmées la même tension.Le courant maximal de la plage de fonctionnement ne peut pas nécessairement être effectué en fonction de diverses conditions car le courant de sortie est limité par la disslipation de puissance PD.Assurez-vous d'éviter d'utiliser le CI dans la condition qui ferait dépasser la température TJ (avg.) = 107 ° C.
La tension d'alimentation de 42 V et le courant de sortie de 4,5 A sont les valeurs maximales de la plage de fonctionnement.Veuillez concevoir le circuit avec suffisamment de compression dans cette plage en considérant la variation d'alimentation, la résistance externe et les caractéristiques électriques du CI.En cas de dépassement de la tension d'alimentation de 42 V et du courant de sortie de 4,5 A, le CI ne fonctionnera pas normalement.
Comment connecter TB6600HG au système de contrôle?
Connexion d'alimentation: Tout d'abord, assurez-vous de fournir une alimentation appropriée à TB6600Hg.Lorsque vous alimentez TB6600Hg, vous devez généralement connecter deux broches: VCC (alimentation positive) et GND (fil de terre).La broche VCC est chargée de fournir la tension requise pour conduire la puce, tandis que la broche GND sert de niveau de sol de référence.Nous devons nous assurer que l'alimentation est stable et répond aux spécifications du TB6600Hg.
Connexion du signal: Selon les besoins spécifiques du système de contrôle, nous devons connecter le signal de commande à la broche correspondante de la puce de pilote TB6600Hg.Ces signaux de contrôle comprennent généralement des signaux de contrôle de direction et des signaux d'impulsion de pas, etc., qui sont responsables de l'instruction de la façon dont le moteur agit, y compris la direction de la rotation et la vitesse de rotation.
Connexion du moteur: nous devons être particulièrement prudents lors de la connexion du moteur à la puce de pilote TB6600Hg.Les deux fils du moteur, généralement rouges et noirs, représentent respectivement les pôles positifs et négatifs du moteur.Le fil rouge se connecte généralement à la borne positive du moteur, tandis que le fil noir se connecte à la borne négative.
Connexion de rétroaction (facultative): Si un encodeur est utilisé pour le contrôle de rétroaction, nous devons également connecter le signal de sortie de l'encodeur au système de contrôle.Cela comprend généralement les sorties de la phase A, de la phase B et de la phase Z (si disponible).
Bouillage: Nous devons nous assurer que le fil de terre commun de tous les équipements est correctement connecté pour éviter les interférences et les dommages.
Paramètres d'initialisation: Une fois la connexion terminée, nous devons initialiser les paramètres du TB6600Hg pour nous assurer qu'il fonctionne correctement.Cela peut inclure le réglage des limites de courant, les modes de pas, etc.
Caractéristiques du produit TB6600HG
• Adopter un radiateur agrandi pour une bonne dissipation de chaleur
• Les instructions de configuration de la subdivision sont imprimées à l'arrière de la carte
• Avec une fonction de protection de court-circuit de sortie, utilisation sans souci
• Adopter un couplage optique à grande vitesse 6N137 pour assurer une vitesse élevée sans perte de synchronisation
• Le courant de sortie est sans pas réglable pour répondre à vos différents besoins d'application
• En utilisant le mode d'entrée de l'anode commun, il existe deux bornes d'entrée, ce qui rend le câblage plus pratique
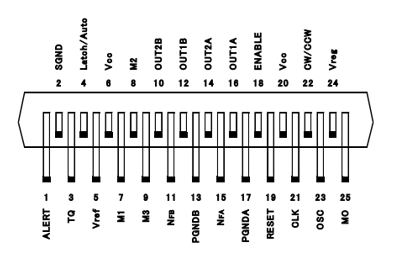
Configuration de la broche de TB6600hg
Description de la fonction de TB6600hg
Paramètres d'excitation
Le mode d'excitation peut être sélectionné à partir des huit modes suivants à l'aide des entrées M1, M2 et M3.Lorsque les entrées M1, M2 ou M3 sont décalées pendant le fonctionnement du moteur, un nouveau mode d'excitation initiée à partir du mode initial, perturbant potentiellement la continuité de la forme d'onde de courant de sortie.
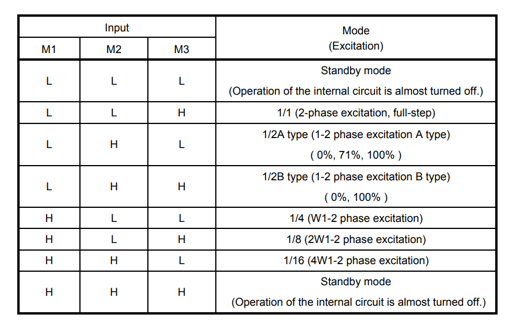
Remarque: Pour modifier le mode passionnant en modifiant M1, M2 et M3, assurez-vous de ne pas définir M1 = M2 = M3 = L ou M1 = M2 = M3 = H.
Mode veille
Le mode de fonctionnement se déplace vers le mode de veille dans la condition M1 = M2 = M3 = L ou M1 = M2 = M3 = H. La consommation d'énergie est minimisée en éteignant toutes les opérations, sauf la protection de l'opération.En mode veille, le terminal de sortie MO est Hz.Le mode de veille est libéré en modifiant l'état de m1 = m2 = m3 = l et m1 = m2 = m3 = h à un autre état.Le signal d'entrée n'est pas accepté pendant environ 200 μs après avoir libéré le mode de veille.
Mode de décroissance
La charge et la décharge d'un courant en mode PWM nécessitent généralement environ cinq cycles dans OSCM.Le mode de décroissance rapide de 40% est initié en inductant la désintégration dans les deux derniers cycles de mode de décroissance rapide, le rapport de 40% restant toujours fixe.La relation entre la fréquence de l'horloge maître (FMCLK), la fréquence OSCM (FOSCM) et la fréquence PWM (FCHOP) est indiquée comme suit:
FOSCM = 1/20 × FMCLK
FCHOP = 1/100 × FMCLK
Lorsque ROSC = 51KΩ, l'horloge maître = 4MHz, OSCM = 200KHz, la fréquence de PWM (FCHOP) = 40KHz.
Mode initial
Lorsque la réinitialisation est utilisée, les courants de phase sont les suivants.
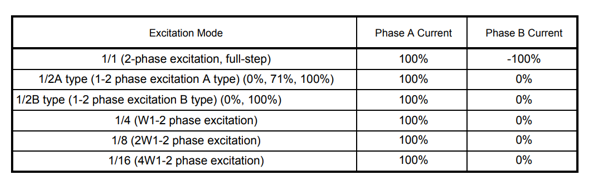
La direction actuelle est définie comme suit.
OUT1A → OUT2A: Direction avant
OUT1B → OUT2B: Direction avant
Application de TB6600hg
Voici quelques applications de TB6600Hg.
• Feux arrière
• bâtiments hôteliers
• Grand affichage LED extérieur
• Alternative aux lumières HID
• Lumières industrielles à haute baie
• rétro-éclairage LED à grand format
• Afficher le rétroéclairage des LED
• Smartphones compatibles avec la caméra
• Topologies de conducteur en hauteur ou en bas
Fauts et solutions communes de TB6600Hg
Ce qui suit répertorie certains défauts courants sur TB6600Hg et leurs solutions pour vous aider à prendre des mesures rapides lors de la rencontre des défauts et de sauvegarder le fonctionnement normal de l'appareil.
Échec un: surchauffe des puces de conducteur
La puce TB6600Hg elle-même est trop chaude, probablement en raison d'une charge excessive ou de mauvaises conditions de dissipation thermique.
Solution: améliorer la dissipation de la chaleur
Nous devons ajouter des dissipateurs de chaleur ou des ventilateurs sur la puce et le moteur du conducteur pour nous assurer qu'ils peuvent dissiper complètement la chaleur pendant le travail.Dans le même temps, nous devons garder l'environnement autour de la puce du conducteur et du moteur bien ventilé pour éviter la surchauffe.
Échec deux: le moteur tourne dans la mauvaise direction
Une fois que le moteur a reçu le signal d'entraînement, la direction de la rotation n'est pas en ligne avec les attentes, il peut être le signal de contrôle est mauvais ou la puce d'entraînement n'est pas correctement configurée.
Solution: vérifiez le signal de contrôle
Nous devons vérifier soigneusement les signaux de contrôle envoyés au TB6600Hg pour nous assurer que le signal de commande de direction et le signal d'impulsion sont corrects.Si un microcontrôleur est utilisé pour envoyer les signaux, veuillez vérifier le code du programme et la configuration des broches.
Échec trois: le moteur ne tourne pas
Le moteur ne répond pas après avoir reçu le signal d'entraînement, il se peut que la puce du conducteur ne fonctionne pas correctement ou qu'il y ait un problème avec la connexion entre le moteur et la puce du conducteur.
Solution: vérifiez l'alimentation et la connexion
Nous devons nous assurer que l'alimentation du TB6600Hg est normale et que la connexion entre le moteur et la puce du conducteur est solide.Nous vérifions la tension et le courant dans le circuit en utilisant un multimètre pour nous assurer qu'ils sont dans la plage normale.
Échec quatre: chauffage moteur sérieux
Le moteur génère une chaleur excessive pendant le fonctionnement, qui peut être causée par un courant excessif ou une mauvaise dissipation de la chaleur.
Solution: ajustez le réglage actuel
Si le moteur génère une chaleur grave, nous pouvons essayer de réduire le courant de sortie de la puce du conducteur.En ajustant la broche de réglage de courant de TB6600Hg, nous pouvons limiter efficacement la taille du courant de sortie, ce qui réduit à son tour la charge sur le moteur et assure un fonctionnement stable et sûr du moteur.
Questions fréquemment posées [FAQ]
1. Quelle est la plage de température de fonctionnement de TB6600Hg?
La température de fonctionnement de TB6600Hg varie de -30 ° C à 85 ° C.
2. Qu'est-ce que TB6600HG?
TB6600HG est un type de pilote de moteur pas à pas, conçu pour contrôler les moteurs pas à pas dans diverses applications telles que les machines CNC, les imprimantes 3D, la robotique et les systèmes d'automatisation.
3. Quelles sont les principales caractéristiques de TB6600Hg?
Les fonctionnalités TB6600HG incluent le courant de moteur réglable, les paramètres de résolution d'étape, la protection de surchauffe intégrée et les entrées opto-isolées pour le contrôle du signal.