Conducteurs de moteur L298N: caractéristiques, diagrammes de circuits et applications
Catalogue
Introduction à L298N
L298N est une version verticale du package de L298.Il s'agit d'une puce de pilote de moteur à pont complet à double canal qui peut accepter une haute tension et un courant élevé.Sa tension de travail peut atteindre 46 V et son courant de sortie maximal est 4A.De plus, L298N a également deux bornes de contrôle d'activation.Ces bornes de contrôle permettent au mode de travail du circuit d'être ajusté dynamiquement en branchant et en débranchant le cavalier embarqué sans être interféré par le signal d'entrée.Le L298N est équipé d'une entrée d'alimentation logique, ce qui permet à la partie de circuit logique interne de fonctionner à basse tension.Dans le même temps, il peut également produire une tension logique de 5V à l'extérieur.Afin d'éviter d'endommager la puce de stabilisation de la tension, lors de l'utilisation d'une tension de conduite supérieure à 12V, il est fortement recommandé d'utiliser une interface 5V externe pour l'alimentation indépendante.
L298N contrôle la borne d'entrée d'E / S sur la puce de commande principale et ajuste la tension de sortie directement à travers l'alimentation pour réaliser l'avant, l'inverse et l'arrêt du moteur.Normalement, L298N peut entraîner directement des relais (quatre voies), des solénoïdes, des solénoïdes, deux moteurs CC et un moteur pas à pas (deux phases ou quatre phases).
Alternatives et équivalents:
• e-l298n
• L298hn
• LM18298T
Caractéristiques fonctionnelles de L298N
Compatibilité de l'entrée logique: l'entrée logique de L298N est compatible avec TTL, CMOS et autres niveaux logiques.
Protection de surchauffe: L298N a une fonction de protection de surchauffe.Lorsque la température de la puce est trop élevée, elle déconnectera automatiquement la sortie.
Diode de polarité libre intégrée: L298N possède une diode de polarité libre intégrée, qui peut être utilisée pour le freinage des moteurs à courant continu.
Grande sortie de courant: L298N peut fournir un courant de sortie important et convient à certaines applications qui nécessitent un courant de conduite important.
Structure à double pont H: L298N intègre une structure à double pont H, qui peut contrôler la direction et la vitesse de deux moteurs CC ou des moteurs pas à pas.
Diagramme de circuit L298N
Le diagramme du circuit de L298N est le suivant:
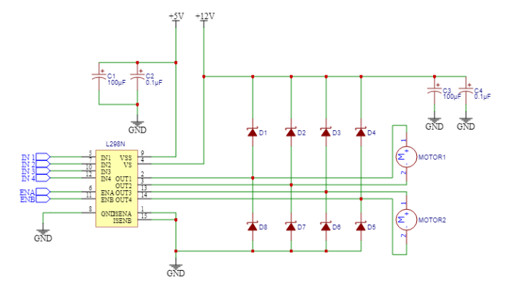
OUT1, OUT2 et OUT3, OUT4 sont connectés à Motor1, Motor2;IN1, in2, in3, IN4 broches du microcontrôleur pour accéder au niveau de contrôle, pour contrôler le moteur vers l'avant et le retour;ENA, ENB connecté au contrôle de la borne Activer, pour contrôler la vitesse du moteur.Le diagramme de la relation logique de contrôle L298N est le suivant:
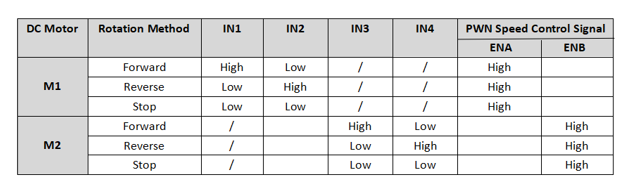
En ce qui concerne la régulation de la vitesse du moteur, nous avons adopté la méthode de régulation de la vitesse PWM.Le principe réside dans la réalisation de la régulation de la vitesse en contrôlant le temps de conduction t du tube de commutation en un cycle.La tension moyenne u à travers le moteur pendant un cycle complet t peut être exprimée comme u = vcc × (t / t) = a × VCC.Où, a = t / t, est connu sous le nom de cycle de service et VCC représente la tension d'alimentation.La vitesse du moteur est proportionnelle à la tension à travers le moteur, tandis que la tension à travers le moteur est proportionnelle au cycle de service de la forme d'onde de contrôle.Par conséquent, il existe une relation proportionnelle entre la vitesse du moteur et le cycle de service: plus le cycle de service est élevé, plus la vitesse du moteur est rapide.
Méthode de contrôle de L298N
Lorsque vous utilisez L298N, nous devons saisir les signaux de contrôle entre in1, in2, in3 et in4 pour contrôler la rotation avant et inversée et la vitesse du moteur.Voici plusieurs méthodes de contrôle:
Mode de contrôle PWM
Le mode PWM peut contrôler efficacement la vitesse du moteur.Lorsque vous utilisez le mode PWM, nous devons utiliser les deux broches EN1 et EN2 pour ajuster la vitesse du moteur.Plus précisément, lorsque les broches EN1 et EN2 sont à haut niveau, le moteur fonctionnera normalement;Lorsqu'ils sont à bas niveau, le moteur cessera de tourner.
Mode de contrôle unidirectionnel
Lorsque In1, In2, In3 et In4 sont en même temps, le moteur tourne vers l'avant;Lorsque deux ports d'entrée sont élevés et que les deux autres ports d'entrée sont bas, le moteur tourne réversement.
Mode de contrôle bidirectionnel
Lorsque vous utilisez le mode de contrôle bidirectionnel, IN1 et IN2 sont responsables du contrôle du moteur 1, tandis que In3 et In4 sont responsables du contrôle du moteur 2. Plus précisément, lorsque In1 est élevé et In2 est de faible niveau, le moteur 1 tourne vers l'avant;Inversement, lorsque In1 est bas et in2 est élevé, le moteur 1 tourne inversement.De la même manière, la logique de commande de In3 et In4 est également applicable à la commande de rotation avant et inverse du moteur 2.
Diagramme de broches et fonctions de L298N
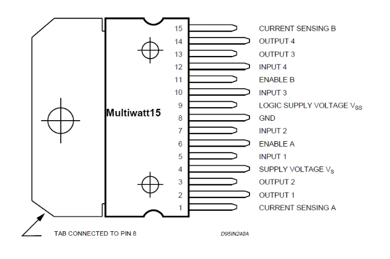
Épingle électrique
VS: entrée de tension d'alimentation (jusqu'à 46 V)
GND: broche à la terre
Broche de commande logique
In1, in2: utilisé pour contrôler la direction de rotation du moteur 1
In3, in4: utilisé pour contrôler la direction de rotation du moteur 2
Pin de commande du moteur:
OUT1, OUT2: Utilisé pour contrôler la direction du moteur 1
Out3, out4: utilisé pour contrôler la direction du moteur 2
ENA: Activer la broche, utilisée pour contrôler la vitesse du moteur 1
ENB: Activer la broche, utilisée pour contrôler la vitesse du moteur 2
Comment utiliser L298N?
Connectez l'alimentation: l'alimentation du module de pilote L298N doit être conservée dans la plage de 12V à 35 V.Dans les applications pratiques, afin d'assurer la stabilité de l'alimentation, nous pouvons également avoir besoin de filtrer l'alimentation.
Connectez les moteurs: nous connectons les deux moteurs aux broches de sortie du L298N via le pilote, et le niveau de contrôle est directement entrée au moteur via le L298N.
Contrôle L298N: Nous utilisons le port de commande (Activer, broche de commande) pour contrôler le L298N.Nous devons définir l'état du port Activer et de la broche de contrôle lors de l'attribution de valeurs.Ces statuts détermineront l'état de niveau de la sortie L298N.En modifiant ces états, nous pouvons contrôler efficacement la rotation avant et inverse et la vitesse du moteur.
Comment utiliser PWM pour réguler la vitesse du moteur?
Si nous voulons utiliser PWM pour réguler la vitesse du moteur, nous avons deux méthodes de câblage:
Méthode de câblage un (recommandé):
Nous supprimons le capuchon du cavalier entre l'activation du canal et le 5V, connectons la broche d'activation à la broche PWM d'Arduino et connectons les broches 1 et 2 aux deux broches normales d'Arduino.De cette façon, nous pouvons contrôler l'interrupteur du canal via la broche PWM pour régler la vitesse du moteur;En contrôlant l'état de niveau des broches 1 et 2, nous pouvons contrôler la direction de rotation du moteur.Cette façon de câbler ne nécessite que l'utilisation d'une broche PWM par canal, mais occupe deux broches normales.Par conséquent, dans les applications pratiques, nous devons peser et choisir parmi plusieurs méthodes de câblage en fonction du nombre d'épingles disponibles sur l'Arduino.
Méthode de câblage deux (non recommandée):
Nous ne supprimons pas le cavalier entre l'activation du canal et le 5V, donc le canal restera en continu.Ensuite, nous avons connecté les broches 1 et 2 aux deux interfaces PWM d'Arduino respectivement.En contrôlant respectivement les sorties correspondant à ces deux broches, nous pouvons contrôler la direction et la vitesse de rotation du moteur.De toute évidence, cette méthode de câblage occupera plus de broches PWM, car chaque canal nécessite deux broches PWM pour contrôler.Cependant, cette méthode n'occupe aucune broche commune.Par conséquent, nous ne recommandons pas d'utiliser ce schéma de câblage lorsque les ressources PWM PIN sont serrées.
Où L298N est-il utilisé?
Véhicules électriques: L298N peut être utilisé pour contrôler les moteurs d'entraînement dans les véhicules électriques, tels que les vélos électriques, les scooters, etc. Par exemple, dans les vélos, en contrôlant avec précision la vitesse de rotation et la direction du moteur, L298N peut atteindre l'accélération, la décélération etConduite stable des vélos électriques.Le cavalier peut transmettre des instructions au L298N en fonctionnant la poignée ou les boutons, contrôlant ainsi la sortie du moteur pour faire le lecteur de vélo en fonction des souhaits du cavalier.
Équipement industriel automatisé: Dans le domaine de l'automatisation industrielle, le L298N peut être utilisé pour contrôler les moteurs de divers équipements industriels, tels que les ceintures, les armes robotiques, les robots industriels, etc. Par exemple, dans le bras robotique, le L298N contrôle avec précision leAngle de rotation et vitesse du moteur, permettant au bras robotique de se déplacer en fonction d'une trajectoire prédéterminée et d'obtenir un fonctionnement de haute précision.Cela améliore non seulement l'efficacité de la production, mais réduit également les pertes de production causées par des erreurs opérationnelles.
Technologie du robot: L298N est souvent utilisé dans les projets de robots pour contrôler le moteur d'entraînement pour réaliser le mouvement et l'action du robot.Les robots industriels doivent souvent entreprendre des travaux de haute précision à charge lourde et ont des exigences extrêmement élevées sur les moteurs d'entraînement.L298N fournit un puissant support de puissance pour les robots industriels avec son excellente capacité de conduite et sa stabilité.Qu'il s'agisse de manipuler, d'assembler ou d'inspection, L298N peut garantir que les robots industriels effectuent des tâches avec précision et efficacement.
Smart Home: Dans Smart Home Systems, L298N peut être utilisé pour contrôler les moteurs des stores, des rideaux, des portes et d'autres équipements pour obtenir un contrôle automatisé.En combinant avec des capteurs, l'équipement domestique peut être automatiquement ajusté en fonction de l'éclairage, de la température et d'autres conditions.
Système de suivi solaire: dans les systèmes solaires, L298N peut être utilisé pour contrôler l'angle d'inclinaison des panneaux solaires pour implémenter un système de suivi solaire.Grâce au contrôle de L298N, le système de suivi solaire peut détecter les changements de position du soleil en temps réel et ajuster l'angle d'inclinaison des panneaux solaires en conséquence.Ce processus d'ajustement dynamique garantit que les panneaux solaires maintiennent toujours l'angle optimal par rapport au soleil, améliorant ainsi l'efficacité de collecte d'énergie des panneaux solaires.
Questions fréquemment posées [FAQ]
1. La vitesse de contrôle L298N peut-elle?
Le L298N est un pilote de moteur à pont H double qui permet en même temps le contrôle de la vitesse et de la direction de deux moteurs CC.
2. Pourquoi mon L298N ne fonctionne-t-il pas?
Il doit être supérieur à 4,5 V pour le fonctionnement correct du L298.2. Vous perdrez peut-être 2,5 V sur le L298.Peut-être qu'il ne reste plus assez de tension pour exécuter le moteur.
3. Qu'est-ce que le L298N?
Le pilote de moteur L298N est un contrôleur qui utilise un pont H pour contrôler facilement la direction des moteurs et PWM pour contrôler la vitesse.Ce module vous permet de gérer indépendamment deux moteurs jusqu'à 2a chacun dans les deux directions.La plage d'approvisionnement peut varier entre 5 V et 35 V, suffisamment pour la plupart des projets de moteur à courant continu.
4. Pouvons-nous connecter 4 moteurs à L298N?
La réponse est oui et non. Cela dépend de la façon dont vous utilisez le pilote de moteur L298N.Le L298N conçu à l'origine pour contrôler deux moteurs CC ou un moteur pas à pas.Mais, si vous ne voulez pas que chaque moteur tourne vers l'arrière, vous pouvez utiliser chaque côté du conducteur L298N pour contrôler deux moteurs CC et un total de 4 moteurs.