Guide de l'utilisation de PIC16F877A pour les projets de moteur pas à pas
Le microcontrôleur PIC16F877A est largement utilisé dans de nombreux projets électroniques car il offre un bon équilibre entre les fonctionnalités et la facilité d'utilisation.Dans ce guide, nous allons examiner de près le PIC16F877A, couvrant tout, de ses modèles Pinout et CAO à son utilisation pour contrôler les moteurs pas à pas.Que vous créiez un appareil simple ou un projet d'automatisation complexe, comprendre comment connecter et contrôler les moteurs à l'aide de ce microcontrôleur vous aidera à obtenir les meilleurs résultats.
Catalogue

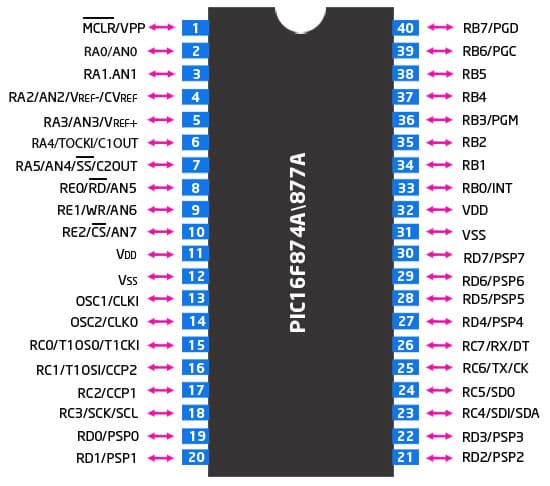
PIC16F877A Configuration de la broche
Modèles CAO pour PIC16F877A
Symbole du diagramme PIC16F877A
PIC16F877A PCB Empreinte

Modèle 3D
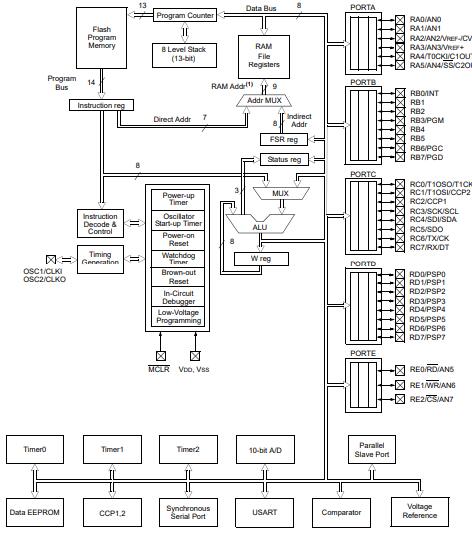
PIC16F877A Structure interne
Spécifications techniques détaillées
| Taper | Paramètre |
| Délai d'usine | 7 semaines |
| Monter | Par le trou |
| Type de montage | Par le trou |
| Package / étui | 40-DIP (0,600, 15,24 mm) |
| Nombre d'épingles | 40 |
| Convertisseurs de données | A / D 8x10b |
| Nombre d'E / OS | 33 |
| Timeurs de garde | Oui |
| Température de fonctionnement | -40°C ~ 85°C ta |
| Conditionnement | Tube |
| Série | Pic® 16F |
| Publié | 1997 |
| Code JESD-609 | E3 |
| Code pbfree | Oui |
| Statut de partie | Actif |
| Niveau de sensibilité à l'humidité (MSL) | 1 (illimité) |
| Nombre de terminaisons | 40 |
| Code ECCN | EAR99 |
| Finition terminale | Étain mat (sn) - recuit |
| Fonctionnalité supplémentaire | Fonctionne à une alimentation minimale 4V |
| Position terminale | DOUBLE |
| Tension d'alimentation | 5V |
| Fréquence | 20 MHz |
| Numéro de pièce de base | Pic16f877a |
| Comptage des broches | 40 |
| Tension d'alimentation-max (VSUP) | 5,5 V |
| Alimentation électrique | 5V |
| Tension d'alimentation-minuscule (VSUP) | 4.5 V |
| Interface | I2C, SPI, SSP, UART, USART |
| Taille de la mémoire | 14KB |
| Type d'oscillateur | Externe |
| Courant d'offre nominal | 1,6 mA |
| Taille RAM | 368 x 8 |
| Tension - Alimentation (VCC / VDD) | 4V ~ 5,5 V |
| types / ucs / ics périphériques | Microcontrôleur, RISC |
| Processeur de base | Pic |
| Périphériques | Détection / réinitialisation de Bround-out, Por, PWM, WDT |
| Type de mémoire du programme | ÉCLAIR |
| Taille de base | 8 bits |
| Taille de la mémoire du programme | 14KB (8K x 14) |
| Connectivité | I2c, SPI, UART / USART |
| Taille | 8 |
| Heure d'accès | 20 µs |
| A adc | Oui |
| Canaux DMA | Non |
| Largeur de bus de données | 8b |
| Nombre de minuteries / compteurs | 3 |
| Adressez la largeur du bus | 8b |
| Densité | 112 Ko |
| Taille de l'éprom | 256 x 8 |
| Famille du processeur | Pic |
| Nombre de canaux ADC | 8 |
| Nombre de canaux PWM | 2 |
| Nombre de canaux I2C | 1 |
| Hauteur | 4,06 mm |
| Longueur | 52,45 mm |
| Largeur | 14.22 mm |
| Atteindre SVHC | Pas de SVHC |
| Durcissement des rayonnements | Non |
| Statut ROHS | ROHS3 conforme |
| Avance libre | Avance libre |
Comprendre les moteurs pas à pas
Un moteur pas à pas est un type de moteur électrique qui se déplace en étapes spécifiques plutôt que dans un mouvement continu comme les moteurs traditionnels.Ces mouvements étape par étape sont mesurés en degrés, ce qui peut varier en fonction de l'application.
Les moteurs pas à pas peuvent fonctionner dans différents modes: lecteur d'onde, le lecteur complet et le demi-entraînement.Chaque mode contrôle la façon dont les phases du moteur sont sous tension, affectant ses performances et la rendant adaptée à diverses utilisations.
En mode d'entraînement des vagues, une seule phase du moteur est alimentée à la fois.Ce mode de contrôle simple est utile pour les situations où l'efficacité électrique est prioritaire sur le couple, comme dans les tâches d'automatisation de base où un courant de départ minimal est nécessaire.
Le mode d'entraînement complet alimente deux phases simultanément.Il en résulte une sortie de couple plus élevée lorsque deux bobines fonctionnent ensemble, ce qui le rend idéal pour les applications où la précision et la résistance sont nécessaires, comme en robotique et en machines CNC.
Le mode Half Drive combine les caractéristiques de l'onde et du lecteur complet en dynamisant alternativement une phase et deux phases.Cette approche fournit des tailles de pas plus petites, doublant efficacement la résolution du moteur.La moitié de la conduite est mieux adaptée aux applications comme l'impression 3D et l'instrumentation fine, où le mouvement en douceur et le positionnement précis sont essentiels.
Lorsque vous choisissez un moteur pas à pas pour une utilisation spécifique, considérez l'environnement de fonctionnement.Pour les tâches de haute précision, le mode Half Drive est recommandé pour assurer des transitions lisses et des vibrations réduites.Pour les projets axés sur les économies d'énergie, le mode d'entraînement des vagues peut être plus approprié.
La sélection du bon mode nécessite des facteurs d'équilibrage tels que le couple, la vitesse et la complexité du système.Le choix du bon mode peut influencer considérablement les performances du moteur et l'efficacité globale de votre système.
Connexion d'un moteur pas à pas avec PIC16F877A
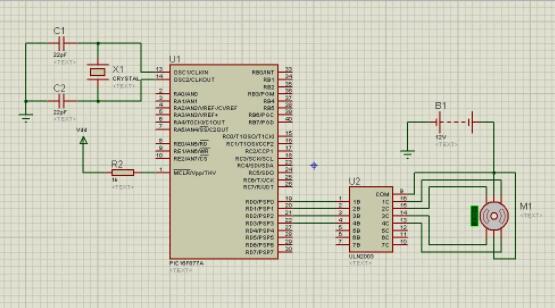
Pour connecter un moteur pas à pas avec un Pic16f877a Microcontrôleur, vous pouvez utiliser le réseau de transistors ULN2003.Ce circuit intégré, conçu pour les moteurs à torque élevé, contient sept paires Darlington.Les bits Portd inférieurs du microcontrôleur sont liés aux broches d'entrée (1b, 2b, 3b, 4b) de l'ULN2003, tandis que ses épingles de sortie (1c, 2c, 3c, 4c) se connectent aux épingles du moteur pas à pas.Les broches communes du moteur et la broche COM de l'ULN2003 sont connectées à une alimentation 12V.
Les moteurs pas à pas sont couramment utilisés pour les applications qui nécessitent un contrôle de mouvement précis.Ils convertissent les impulsions numériques en rotation mécanique, ce qui les rend idéales pour des appareils tels que les machines CNC et les imprimantes 3D, où la position et la vitesse doivent être soigneusement réglementées.
L'ULN2003 joue un rôle clé dans le contrôle des moteurs pas à pas en raison de sa capacité à gérer un courant élevé et son interfaçage facile avec les microcontrôleurs.Lorsqu'ils sont connectés au PIC16F877A, les bits Portd inférieurs sont utilisés pour contrôler le moteur pas à pas.Cette configuration fournit un contrôle étape précis, garantissant un mouvement et un positionnement précis.
L'utilisation de l'ULN2003 dans les configurations de contrôle du moteur est très fiable dans les applications du monde réel.Il aide à minimiser les problèmes tels que les étapes manquées ou le positionnement incorrect, améliorant les performances globales.La maintenance et l'étalonnage réguliers basés sur les données d'utilisation peuvent optimiser davantage la fonction moteur, garantissant une stabilité à long terme et un fonctionnement précis.
Réglage de la vitesse du moteur pas à pas
La vitesse du moteur pas à pas peut être modifiée avec précision à l'aide du logiciel de simulation Proteus.En accédant aux paramètres du moteur via «Modifier les propriétés», des ajustements aux paramètres tels que le nombre d'étapes et l'angle de pas peuvent être effectués.Par exemple, un moteur de 200 étapes divise une rotation complète (360 °) en 200 étapes, rendant chaque étape 1,8 °.La modification de ces paramètres dans Proteus se reflétera dynamiquement pendant la simulation.
Dans la pratique, les moteurs pas à pas sont souvent utilisés dans les industries où un contrôle précis du mouvement est crucial, comme dans les machines CNC et la robotique.Réglage de l'angle d'étape et du nombre d'étapes affinent le moteur pour obtenir le mouvement exact requis pour des tâches spécifiques.
La modification des paramètres du moteur pas à pas affecte les caractéristiques de performance telles que le couple et la résolution.Par exemple, l'augmentation du nombre d'étapes améliore généralement la résolution mais peut avoir un impact sur le couple et le temps de réponse.Comprendre ces compromis par simulation aide à prendre des décisions éclairées.
Une perspective nuancée révèle que les ajustements itératifs, suivis des essais pratiques, conduisent à une conception de moteur plus robuste.S'assurer que les simulations numériques reflètent étroitement les résultats du monde réel est essentiel.Les nuances de la configuration d'un moteur pas à pas résident en effet dans la suppression d'un équilibre entre la précision théorique et la faisabilité pratique.

Programmation d'un moteur pas à pas avec PIC16F877A
Cette section couvre comment programmer un moteur pas à pas en utilisant le microcontrôleur PIC16F877A, expliquant différents modes de conduite et fournissant des conseils pratiques pour une implémentation efficace.
Voici un exemple de code de base pour démontrer le contrôle du moteur pas à pas en utilisant le mode d'entraînement complet:
vide main ()
{
TRISD = 0B00000000;// Définir Portd comme sortie
Portd = 0b1111111;// Initialiser Portd
faire
{
Portd = 0b00000011;// dynamiser deux phases simultanément
Delay_ms (500);// retard de 0,5 seconde
Portd = 0b00000110;
Delay_ms (500);
Portd = 0b00001100;
Delay_ms (500);
Portd = 0b00001001;
Delay_ms (500);
} while (1);// boucle indéfiniment
}
Dans ce code, le portd PIC16F877A est configuré comme un port de sortie pour contrôler le moteur pas à pas via le pilote ULN2003.La séquence des commandes dynamise deux phases du moteur pas à pas à la fois, ce qui est caractéristique du mode de conduite complet.Ce mode maintient le rotor en position fixe avec un couple maximal mais consomme généralement plus de puissance.
Le mode d'entraînement complet n'est pas le seul moyen de contrôler les moteurs pas à pas.Les modes de conduite à l'onde et de demi-entraînement fournissent des alternatives basées sur des exigences spécifiques.L'envoi d'onde dynamise une seule phase à la fois, ce qui réduit la consommation d'énergie mais entraîne un couple plus faible.La demi-conduite supplique entre une et deux phases, offrant une résolution plus élevée et un mouvement plus lisse.
Lors de la programmation des moteurs pas à pas, choisissez le mode de conduite qui correspond le mieux à vos besoins, que ce soit pour un positionnement précis, une efficacité électrique ou un couple maximal.
Applications pratiques des moteurs pas à pas
Les moteurs pas à pas sont largement utilisés dans de nombreuses industries en raison de leur capacité à fournir un contrôle précis et des performances fiables.Leur polyvalence les rend adaptés à tout, des voitures et des appareils électroménagers aux machines industrielles et aux dispositifs médicaux.
Dans le monde automobile, les moteurs pas à pas jouent un rôle clé dans le contrôle des systèmes comme l'accélérateur, les phares et la climatisation.Ils aident à affiner ces composants, en s'assurant que les véhicules se déroulent bien et efficacement.Pendant ce temps, dans des équipements de bureau comme les imprimantes et les photocopiers, les moteurs pas à pas gérer des tâches telles que l'alimentation en papier et le placement de l'encre.Cette précision garantit une qualité d'impression cohérente et un fonctionnement en douceur au fil du temps.
À la maison, les appareils électroménagers comme les machines à laver et les lave-vaisselle comptent sur des moteurs pas à pas pour contrôler l'écoulement de l'eau et la rotation du tambour, garantissant que tout fonctionne de manière transparente.Dans les milieux industriels, les moteurs pas à pas sont cruciaux pour faire fonctionner les machines CNC et les bras robotiques, où ils fournissent les mouvements exacts nécessaires à la fabrication de haute précision.
Les systèmes de sécurité bénéficient également du mouvement fiable des moteurs pas à pas.Dans des appareils tels que les caméras de surveillance et les serrures automatisées, les moteurs pas à pas permettent un positionnement fluide et précis, ce qui est essentiel pour une surveillance et une sécurité efficaces.Dans les soins de santé, les moteurs pas à pas sont utilisés dans des dispositifs médicaux comme les pompes à perfusion et l'équipement d'imagerie, où ils offrent le contrôle précis nécessaire pour un fonctionnement sûr et précis.
Alors que la technologie continue d'évoluer, les moteurs pas à pas devraient trouver encore plus d'applications dans des domaines émergents comme la robotique et les véhicules autonomes.Leur développement continu conduira probablement à une précision et une efficacité encore plus importantes, élargissant leur rôle dans diverses industries.
Pièces de microcontrôleur comparables
| Numéro de pièce | Pic16f877a-i / p | Pic16f77-i / p | Pic16f74-i / p | Pic16f777-i / p |
| Fabricant | Technologie des micropuces | Technologie des micropuces | Technologie des micropuces | Technologie des micropuces |
| Package / étui | 40-DIP (0,600, 15,24 mm) | 40-DIP (0,600, 15,24 mm) | 40-DIP (0,600, 15,24 mm) | 40-DIP (0,600, 15,24 mm) |
| Nombre d'épingles | 40 | 40 | 40 | 40 |
| Largeur de bus de données | 8 b | 8 b | 8 b | 8 b |
| Nombre d'E / S | 33 | 33 | 33 | 36 |
| Interface | I2C, SPI, SSP, UART, USART | I2C, SPI, SSP, UART, USART | I2C, SPI, SSP, UART, USART | I2c, spi, uart, usart |
| Taille de la mémoire | 14 kb | 7 kb | 14 kb | 14 kb |
| Tension d'alimentation | 5 V | 5 V | 5 V | 5 V |
| Périphériques | Détection / réinitialisation de Bround-out, Por, PWM, WDT | Détection / réinitialisation de Bround-out, Por, PWM, WDT | Détection / réinitialisation de Bround-out, Por, PWM, WDT | Détection / réinitialisation de Bround-out, Por, PWM, WDT |
| Voir comparer | Pic16f877a-i / p CONTRE Pic16f77-i / p | Pic16f877a-i / p CONTRE Pic16f77-i / p | Pic16f877a-i / p CONTRE Pic16f74-i / p | Pic16f877a-i / p CONTRE Pic16f777-i / p |
Questions fréquemment posées [FAQ]
1. Qu'utilise un moteur pas à pas pour générer un mouvement mécanique?
Un moteur pas à pas génère un mouvement mécanique à l'aide d'impulsions électriques.
2. Que fait un moteur pas à pas?
Un moteur pas à pas se déplace en étapes discrètes.
3. Comment les moteurs pas à pas sont-ils mesurés?
Les moteurs pas à pas sont mesurés en degrés.
4. Combien de pas prennent un moteur pas à pas?
Un moteur pas à pas déplace une étape à la fois.
5. Combien de modes d'excitation un moteur pas à pas a-t-il?
Un moteur pas à pas a trois modes d'excitation.
6. Quelle est la façon la plus simple de connecter un moteur pas à pas?
Le moyen le plus simple est de le connecter à un microcontrôleur PIC16F877A.
7. Combien d'épingles d'entrée de l'ULN2003 sont connectées aux bits importants les plus bas du Portd du microcontrôleur?
Quatre broches d'entrée sont connectées aux bits significatifs les plus bas
À propos de nous
ALLELCO LIMITED
Lire la suite
Enquête rapide
Veuillez envoyer une demande, nous répondrons immédiatement.
Pourquoi choisir la puce mémoire Adesto RM25C64DS-LTAI-B pour votre projet?
sur 2024/10/10
PC817 Optocoupleur: fonctionnalité et applications modernes
sur 2024/10/10
Articles populaires
-
Qu'est-ce que GND dans le circuit?
sur 1970/01/1 2838
-

Guide du connecteur RJ-45: codes de couleur du connecteur RJ-45, schémas de câblage, applications R-J45, feuilles de données RJ-45
sur 1970/01/1 2410
-

Types de connecteur de fibre: SC vs LC et LC vs MTP
sur 1970/01/1 2020
-
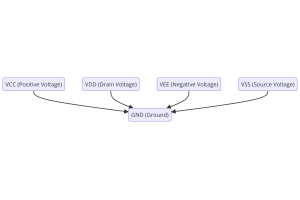
Comprendre les tensions d'alimentation en électronique VCC, VDD, VEE, VSS et GND
sur 0400/11/5 1766
-

Comparaison entre DB9 et RS232
sur 1970/01/1 1727
-

Qu'est-ce qu'une batterie LR44?
L'électricité, cette force omniprésente, imprègne tranquillement tous les aspects de notre vie quotidienne, des gadgets triviaux aux équipements médicaux potentiellement mortels, il joue un rôle silencieux.Cependant, saisir vraiment cette énergie, en particulier la façon de les stocker et de le produire efficacement, n'est pas une tâche facile.C'est dans ce contexte que cet article se co...sur 1970/01/1 1680
-
Comprendre les principes fondamentaux: résistance à l'inductance et connexion
Dans la danse complexe de l'ingénierie électrique, un trio d'éléments fondamentaux occupe le devant de la scène: inductance, résistance et capacité.Chacun porte des traits uniques qui dictent les rythmes dynamiques des circuits électroniques.Ici, nous nous lançons dans un voyage pour déchiffrer les complexités de ces composants, pour découvrir leurs rôles et utilisations pratiques dis...sur 1970/01/1 1622
-

Guide complet de la batterie CR2430: spécifications, applications et comparaison avec les batteries CR2032
Qu'est-ce que la batterie CR2430?Avantages des batteries CR2430NormeApplications de la batterie CR2430CR2430 équivalentCR2430 vs CR2032Taille de la batterie CR2430Que rechercher lors de l'achat du CR2430 et des équivalentsFiche de données PDFQuestions fréquemment posées Les batteries sont le cœur des petits appareils électroniques.Parmi les nombreux types disponibles, les cellules de monnai...sur 1970/01/1 1495
-

CR2450 vs CR2032: La batterie peut-elle être utilisée à la place?
Les batteries de manganèse au lithium ont des similitudes avec d'autres batteries au lithium.La densité élevée en énergie et la longue durée de vie sont les caractéristiques qu'ils ont en commun.Ce type de batterie a gagné la confiance et la faveur de nombreux consommateurs en raison de sa sécurité unique.Gadgets technologiques coûteux?Petits appareils dans nos maisons?Regardez autour d...sur 1970/01/1 1471
-
Qu'est-ce que RF et pourquoi l'utilisons-nous?
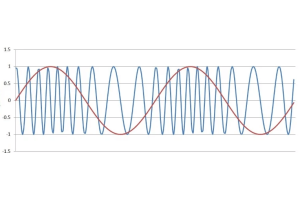
La technologie de radiofréquence (RF) est un élément clé de la communication sans fil moderne, permettant la transmission des données sur de longues distances sans connexions physiques.Cet article plonge dans les bases de la RF, expliquant comment le rayonnement électromagnétique (EMR) rend possible la communication RF.Nous explorerons les principes de la DME, la création et le contrôle d...sur 1970/01/1 1454
Numéro de pièce chaud
-
TPS51219RTER
Texas Instruments
IC REG CTRLR BUCK 16WQFN
AD5752RBREZ
Analog Devices Inc.
IC DAC 16BIT V-OUT 24TSSOP
FQD4N25TM-WS
onsemi
MOSFET N-CH 250V 3A DPAK
0603YD100KAT2A
KYOCERA AVX
CAP CER 10PF 16V X5R 0603
RMCF2512JT1R00
Stackpole Electronics, Inc.
RES 1 OHM 5% 1W 2512
XC6VSX315T-3FFG1156C
AMD
IC FPGA 600 I/O 1156FCBGA
VT1175SFQX
Analog Devices Inc./Maxim Integrated
IC CHIP QFN SMD
AP7311-20WG-7
Diodes Incorporated
IC REG LINEAR 2V 150MA SOT25
XC6504A1217R-G
Torex Semiconductor Ltd
IC REG LIN 1.2V 150MA USPN-4B02
71V416S10PHG
Renesas Electronics America Inc
IC SRAM 4MBIT PARALLEL 44TSOP II
CL21A475KACLRNC
Samsung Electro-Mechanics America, Inc.
CAP CER 4.7UF 25V X5R 0805
ADF4111BRUZ-RL
Analog Devices Inc.
IC CLK/FREQ SYNTH 16TSSOP
MIC2940A-12BU
Microchip Technology
IC REG LINEAR 12V 1.25A TO263-3
LT1507CS8#PBF
Analog Devices Inc.
IC REG BUCK ADJ 1.5A 8SOIC
1812CC393KAT1A\SB
KYOCERA AVX
CAP CER 0.039UF 630V X7R 1812
F971A476MNC
KYOCERA AVX
CAP TANT 47UF 20% 10V 2917
LT3690IUFE#PBF
Analog Devices Inc.
IC REG BUCK ADJUSTABLE 4A 26QFN
BZT52C3V6
Taiwan Semiconductor Corporation
SOD-123F, 500MW, 5%, SMALL SIGNA -

C3216JB2E473K160AA
TDK Corporation
CAP CER 0.047UF 250V JB 1206
MC33PF8100FJES
NXP USA Inc.
POWER MANAGEMENT IC, I.MX8, PRE-
DMN5L06VK-13A
Diodes Incorporated
DIODE
AO4407B
Alpha & Omega Semiconductor Inc.
MOSFET P-CH 30V 12A 8SOIC
RT1206BRE0722KL
YAGEO
RES SMD 22K OHM 0.1% 1/4W 1206
C0402C0G1C220J020BC
TDK Corporation
CAP CER 22PF 16V C0G 01005
P3203UCLRP
Littelfuse Inc.
THYRISTOR 270V 400A 6SMD GW
OPA355NA/3K
Texas Instruments
IC CMOS 1 CIRCUIT SOT23-6
AD22100KT
Analog Devices Inc.
SENSOR ANALOG 0C-100C TO92-3
LES20A48-3V3RE
Artesyn Embedded Power
DC DC CONVERTER 3.3V 66W
MPC9109FA
NXP USA Inc.
IC CLOCK DISTRIB LV 1:18 32-LQFP
MCP1826ST-3302E/DB
Microchip Technology
IC REG LINEAR 3.3V 1A SOT223-3
IS46TR16128BL-125KBLA1
ISSI, Integrated Silicon Solution Inc
IC DRAM 2GBIT PARALLEL 96TWBGA
EPF10K100AFC484-2
Intel
IC FPGA 369 I/O 484FBGA
MP86945-AGVT-Z
Monolithic Power Systems Inc.
IC HALF-BRIDGE 60A 25TQFN
LT3502AIDC
Analog Devices Inc.
IC REG BUCK ADJ 500MA 8DFN
MAX921CSA
Analog Devices Inc./Maxim Integrated
IC COMPARATOR 1 W/VOLT REF 8SOIC
INA121PA
Texas Instruments
IC INST AMP 1 CIRCUIT 8DIP -

EP3C5E144C8N
Intel
IC FPGA 94 I/O 144EQFP
CEP125NP-1R8MC-H
Sumida America Components Inc.
FIXED IND 1.8UH 15.5A 3.4MOHM SM
XLH736008.000000I
Renesas Electronics America Inc
XTAL OSC XO 8.0000MHZ HCMOS SMD
1N5358B
onsemi
DIODE ZENER 22V 5W AXIAL
JANTX1N4618UR-1
Microchip Technology
DIODE ZENER 2.7V 500MW DO213AA
TL750L10QD
Texas Instruments
IC REG LINEAR FIXED LDO REG
DCX143TU-7-F
Diodes Incorporated
TRANS PREBIAS NPN/PNP SOT363
BQ2014SN-D120TR
Texas Instruments
IC BATTERY GAS GAUGE 16-SOIC
CY74FCT240TQCT
Texas Instruments
IC BUF INVERT 5.25V 20SSOP/QSOP
TL7757CDR
Texas Instruments
IC SUPERVISOR 1 CHANNEL 8SOIC
1N5927B
Microchip Technology
ZENER DIODE
06035C181JAT4A
KYOCERA AVX
CAP CER 180PF 50V X7R 0603
AD7524KPZ
Analog Devices Inc.
IC DAC 8BIT A-OUT 20PLCC
MCP1711T-30I/OT
Microchip Technology
IC REG LINEAR 3V 150MA SOT23-5
GRM0335C1E7R7DA01D
Murata Electronics
CAP CER 7.7PF 25V C0G/NP0 0201
NR4010T470M
Taiyo Yuden
FIXED IND 47UH 280MA 2.172OHM SM
12CTQ035S
Vishay General Semiconductor - Diodes Division
DIODE ARRAY SCHOTTKY 35V D2PAK
WJLXT972ALC.A4-857345
Inphi Corporation
IC TXRX ETHERNET 100MBPS 64LQFP